基本資料 (0 - 1 分鐘)
各位教授好,我是穎沛,來自機械系,成績方面除了維持系上前 20%,對控制與機器學習非常有興趣,想特別提一下我在瑞典皇家理工學院當交換生時修的深度學習與機器人導論。
那邊的教學風格和交大很不一樣。他們不依賴大量的紙筆考試,而是用高強度的一對一 Demo 與 Code Review。
在我完成實作 展示成果時,助教會針對我程式碼中的邏輯或數學推導,進行深入的追問。
他們總是問一些我當下答不出來的底層機制,這種嚴格要求,讓我了解到一個好的研究者,不能只求會算、會動,更必須掌握背後嚴謹的數學推導。
報考動機 (1 - 2 分鐘)

右邊這張圖 是大學陪伴我三年的四足機器人專題。
在開發過程中,我遇到其中一個難題是 雖然強化學習訓練的神經網路讓它走得很好,但它實質上是個黑盒子,我知道它會走,但無法從數學上證明它在極端狀況下也是安全的。
這段經驗讓我意識到,單靠實作與調參,無法解決控制系統最核心的問題。我希望自己未來不只是讓系統能動,而是能清楚知道它為什麼可靠。
這是我選擇報考這裡的原因。我知道交大電控在非線性控制以及智慧機器人都有很深的研究,希望能在這裡,補上理論工具,解決過去在實作上無法突破的瓶頸。
未來研究方向 (2 - 3 分鐘)

基於過去軟硬體整合的經驗,我發現現今做機器人的挑戰在於是否可靠,因此我未來的研究想從在以下三個面向切入。
第一是 安全性,延續四足的經驗,我想探討如何結合控制理論與學習式方法,為它們建立可分析、可驗證的安全性條件,而不是只依賴模型表現。
第二是 感知能力,真實環境中,往往不只用一種感測器。我想研究多模態融合,整合視覺與各類感測資訊,提升機器人在混亂環境下的理解與決策能力
第三是 強健性,我想探討如何解決模擬與現實的落差,讓模擬中學到的策略,能夠在實體有一致地表現。
總結來說,我希望能在研究所把過去的實作經驗轉化為紮實的學術貢獻。
專題-1 (0 - 1 分鐘)
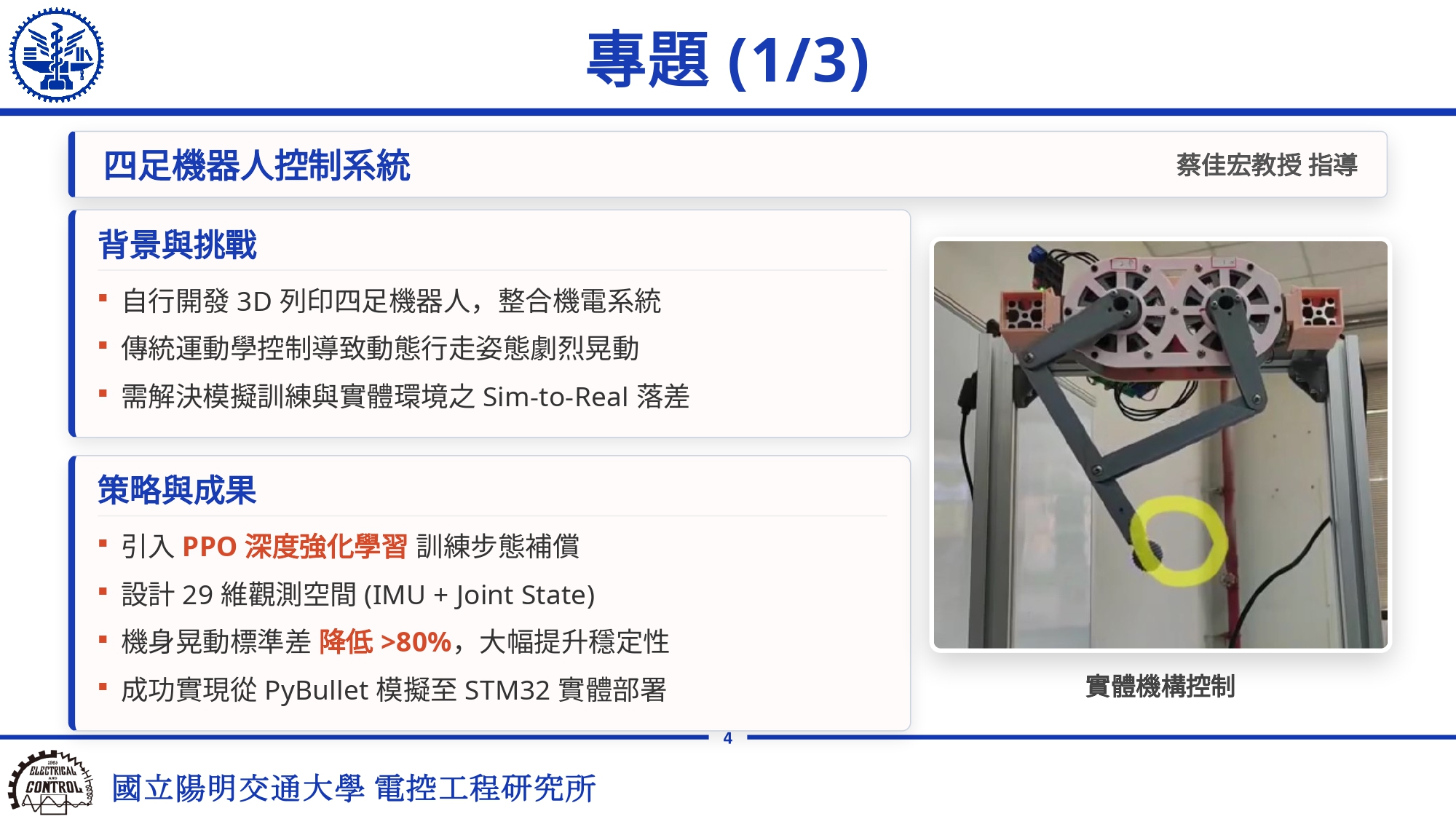
首先是這隻四足機器人,它從 3D 列印、電路焊接、 STM32 韌體到控制系統,都是我和同學自行整合完成的。
在開發過程中的主要挑戰是,傳統的運動學控制在行走時容易產生劇烈晃動,穩定性不足。
為了解決這個問題,我用深度強化學習,在模擬環境中訓練步態補償策略,並設計包含 IMU 與關節狀態,共 29 維的觀測空間,最後成功降低模擬時的晃動標準差達 80%
這個專題讓我累積了從模擬到實體控制的完整經驗,也讓我開始思考學習式控制在安全與穩定性上的限制。
專題-2 (1 - 2 分鐘)
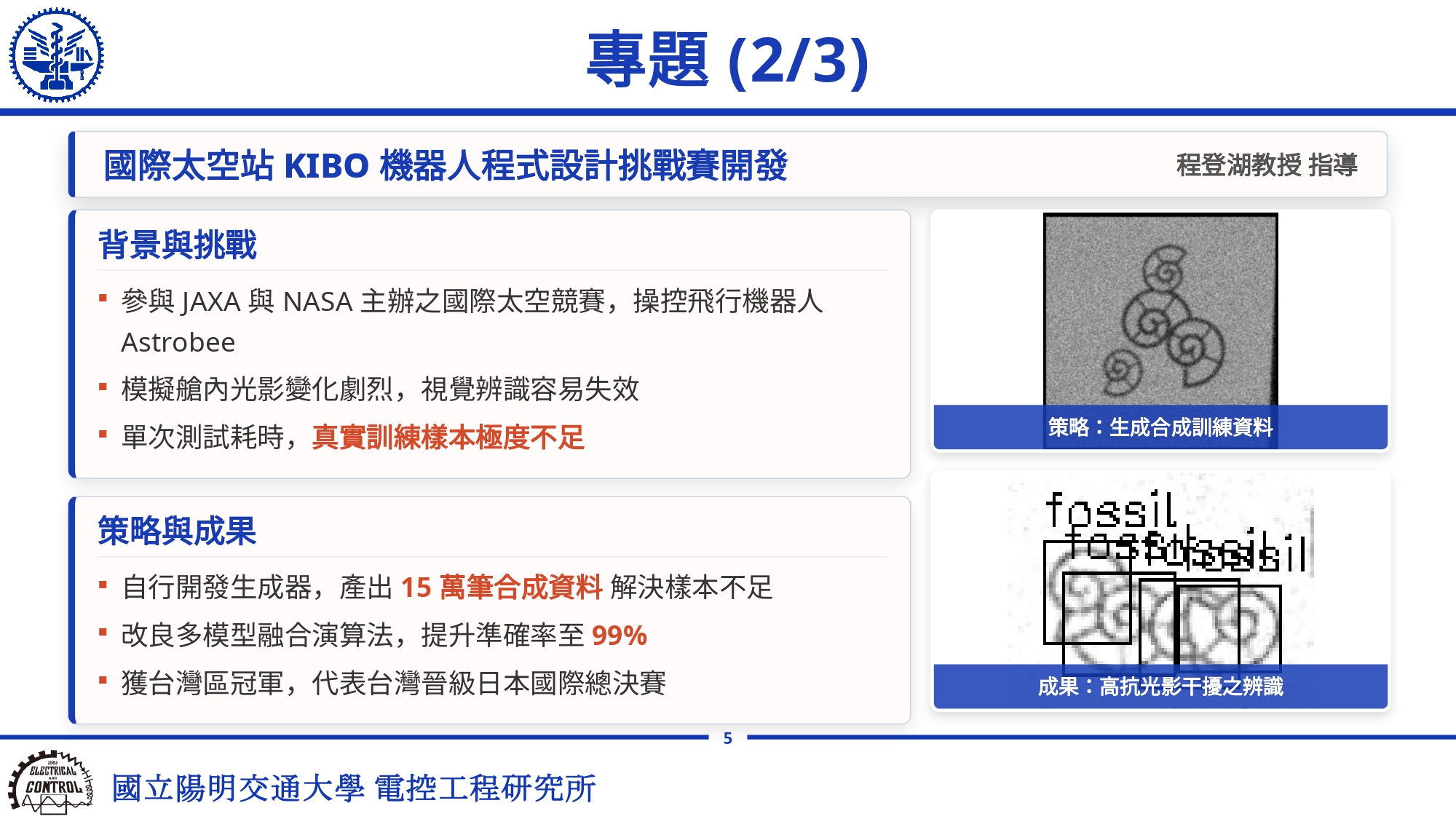
第二個專案是參加 JAXA 與 NASA 舉辦的 Kibo 機器人程式競賽。 我們的任務是要在國際太空站操控飛行機器人完成指定任務。
這個專案最大的挑戰在於,太空艙內光影變化劇烈,加上單次測試非常耗時,導致獲得的實際資料非常有限,使初期的視覺辨識模型容易失效。
為了解決資料不足的問題,我們自行開發資料生成器,產生大量合成影像,並透過多模型融合的方法提升辨識穩定性。
最終辨識準確率提升到 99%,也獲得台灣區冠軍,在今年會代表台灣前往日本參加國際決賽。
專題-3 (2 - 3 分鐘)
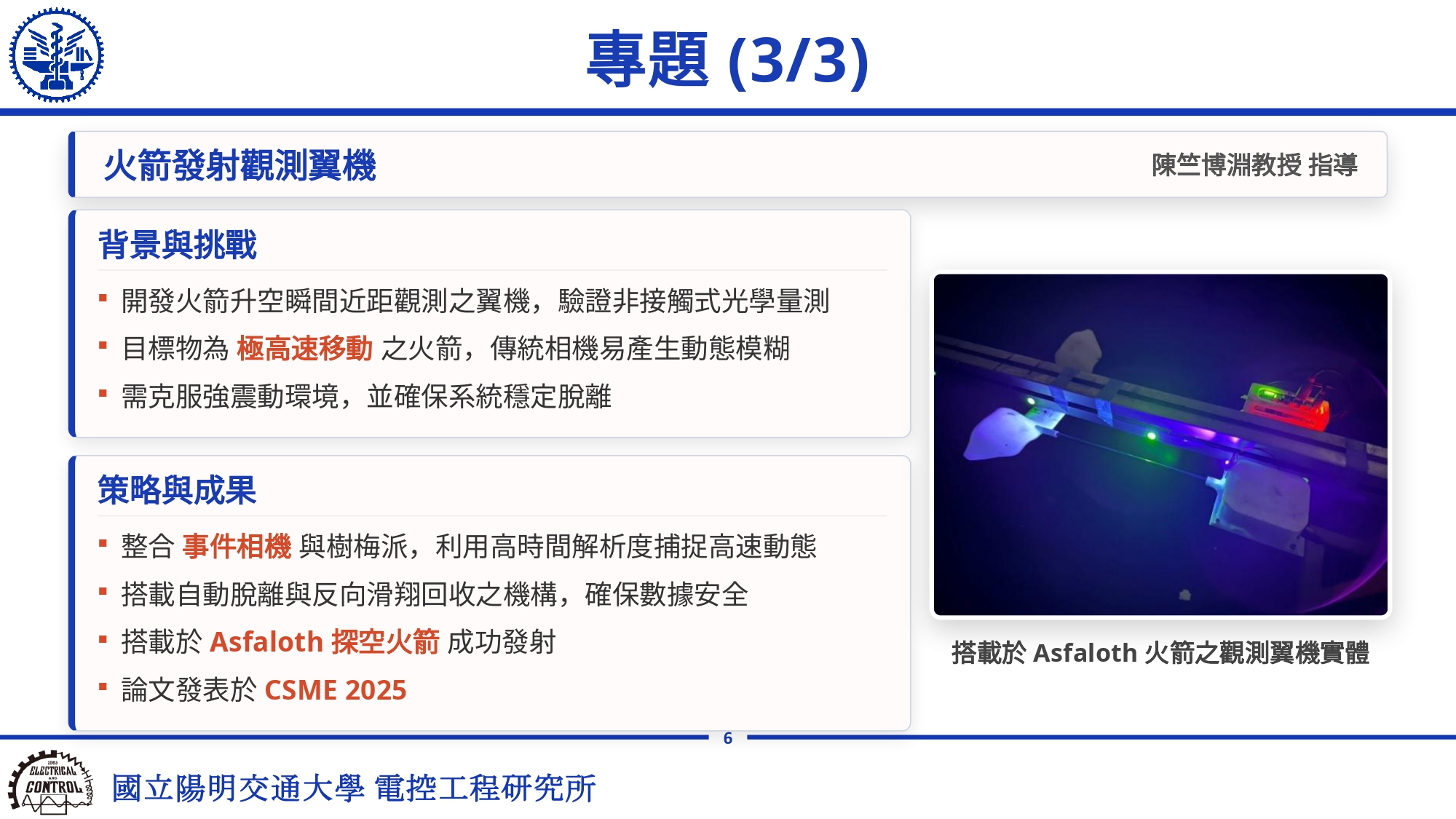
最後一個專案是與探空火箭相關的觀測翼機系統,目標是在火箭升空前期,進行近距離的非接觸式量測。
這個專案最大的挑戰在於,目標高速移動,使傳統相機容易產生嚴重的動態模糊;同時系統在發射前必須長時間待機,且無法進行通訊。
我們選擇使用事件相機,利用其高時間解析度特性來捕捉高速動態,並設計自動脫離與回收機構,確保系統與資料安全;在系統架構上,也實作了能自動接收地面站訊號並自啟動的控制流程。
該系統成功搭載於 Asfaloth 探空火箭發射,相關成果也發表於 CSME 2025。
以上三個專案,代表了我具備從演算法設計到硬體實踐的完整能力,謝謝。
備問
你說純 AI 是黑盒子,那你覺得應該用什麼樣的控制理論來解決?
Lyapunov MPC
你大學做的四足機器人用的是什麼控制方法?為什麼那時候不用非線性控制?
誠實回答當時的限制(如算力不足、數學底子不夠),所以現在才想來研究所學。
你說的安全邊界,是指哪一類方法?
CBF / Lyapunov / MPC constraint
學習怎麼跟控制結合?
Learning for model / policy + safety filter