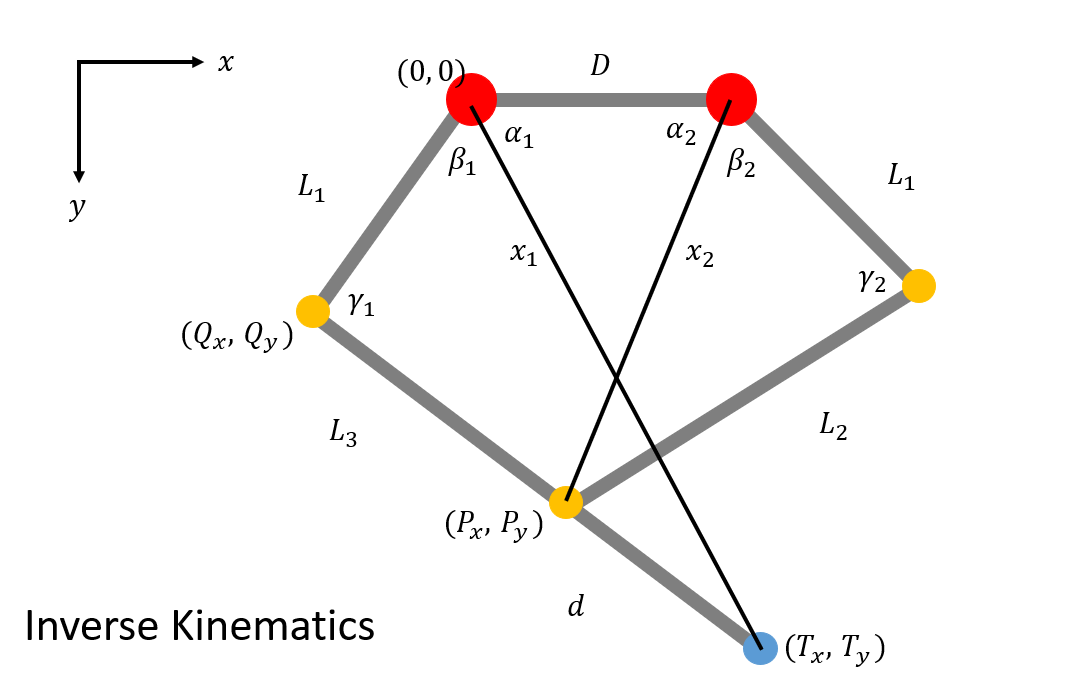
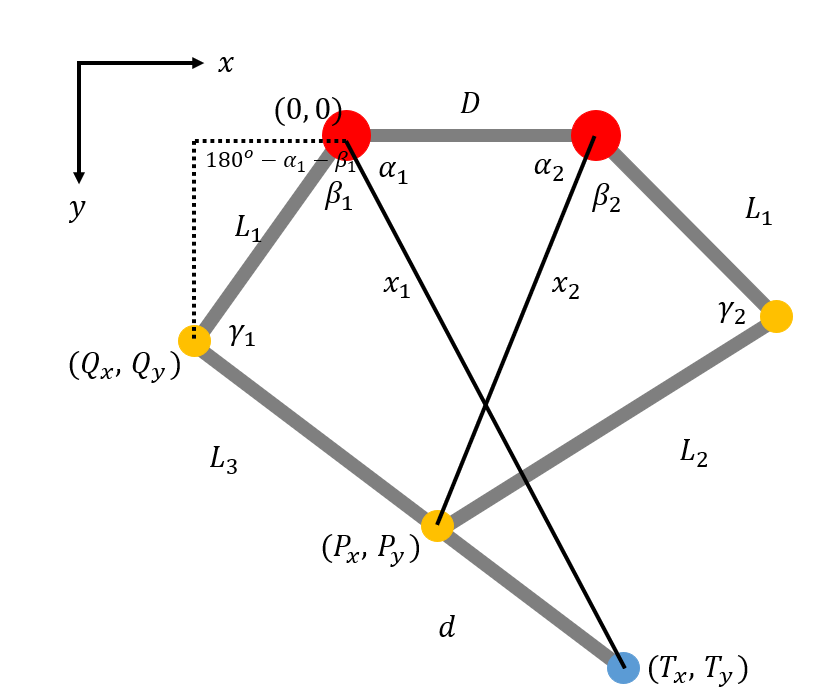
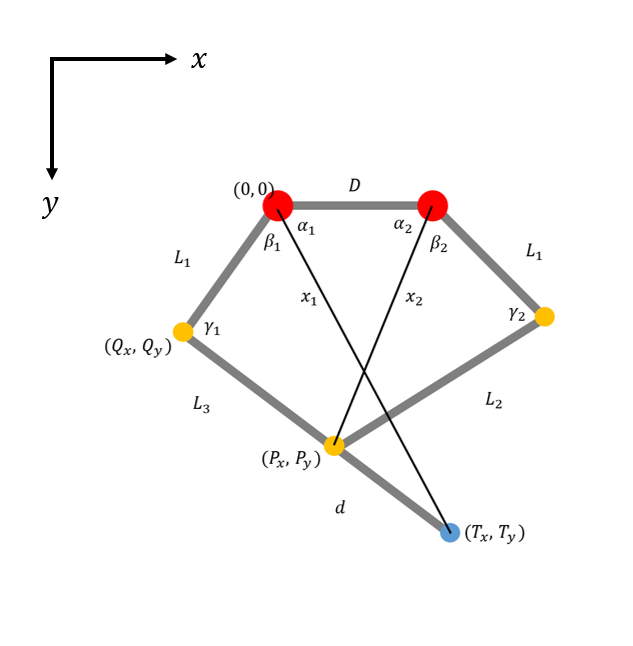
academic & c++ Forward kinematic § Inverse kinematic § Position transformation § Calculate α1 and β1 x1α1β1=Tx2+Ty2=arctan(Tx−Ty)−1=arccos(2⋅x1⋅L1x12+L12−(L3+d)2) Calculate Px and Py (for calculation of α2 and β2) Q_x &= -L_1 \cdot \cos(180^\circ - \alpha_1 - \beta_1) \\ Q_y &= -L_1 \cdot \sin(180^\circ - \alpha_1 - \beta_1) \end{cases} \\ &\Rightarrow \begin{cases} Q_x &= L_1 \cdot \cos(\alpha_1 + \beta_1) \\ Q_y &= -L_1 \cdot \sin(\alpha_1 + \beta_1) \end{cases} \\ \\ &\begin{cases} P_x &= \frac{Q_x \cdot d + T_x \cdot L_3}{d + L_3} \\ P_y &= \frac{Q_y \cdot d + T_y \cdot L_3}{d + L_3} \end{cases} \end{align*} Calculate α2 and β2 x_2 &= \sqrt{ (D - P_x)^2 + P_y^2 } \\ \alpha_2 &= \arctan\left(\frac{-P_y}{D - P_x}\right) \\ \beta_2 &= \arccos\left(\frac{x_2^2 + L_1^2 - L_2^2}{2 \cdot x_2 \cdot L_1}\right)\\ \end{align*}$$ >[!Summary] > > >$$\begin{align*} \theta_1 = \alpha_1 + \beta_1 &= \arctan\left(\sqrt{\frac{T_y^2}{T_x^2}}\right) + \arccos\left(\frac{1}{16}\left(\frac{T_x^2 + T_y^2 - 260}{\sqrt{T_x^2 + T_y^2}}\right)\right) \\ \theta_2 = \alpha_2 + \beta_2 &= \arctan \left( \frac{\frac{-64}{18} \sin(\arctan(\sqrt{T_y^2/T_x^2}) + \arccos(\frac{1}{16} (\frac{T_x^2 + T_y^2 - 260}{\sqrt{T_x^2 + T_y^2}}))) + 10 T_y}{8.16 - \frac{32}{9} \cos(\arctan(\sqrt{T_y^2/T_x^2})+\arccos(\frac{1}{16} (\frac{T_x^2 + T_y^2 - 260}{\sqrt{T_x^2 + T_y^2}}))) - \frac{5}{9} T_x} \right) \\ &+ \arccos \left( \frac{\frac{1}{16} (\left(8.16 - \frac{32}{9} \cos(\arctan(\sqrt{T_y^2/T_x^2}) + \arccos(\frac{1}{16} (\frac{T_x^2 + T_y^2 - 260}{\sqrt{T_x^2 + T_y^2}}))) - \frac{5}{9} T_x\right)^2 + \frac{-64}{324} \sin(\arctan(\sqrt{T_y^2/T_x^2}) + \arccos(\frac{1}{16} (\frac{T_x^2 + T_y^2 - 260}{\sqrt{T_x^2 + T_y^2}})) + 10 T_y)^2 - 105}{\sqrt{\left(8.16 - \frac{32}{9} \cos(\arctan(\sqrt{T_y^2/T_x^2}) + \arccos(\frac{1}{16} (\frac{T_x^2 + T_y^2 - 260}{\sqrt{T_x^2 + T_y^2}}))) - \frac{5}{9} T_x\right)^2 + \frac{-64}{324} \sin(\arctan(\sqrt{T_y^2/T_x^2}) + \arccos(\frac{1}{16} (\frac{T_x^2 + T_y^2 - 260}{\sqrt{T_x^2 + T_y^2}})) + 10 T_y)^2}} \right) \\ \end{align*}$$ > kind of scary...This function is only for demonstration, I'm not going to use it in c++ programming, but break down the steps and store the values into variables instead. ## Route control - PID - Stanley Controller - Pure Pursuit Algorithm - MPC (Model Predictive Control) - LQR (Linear Quadratic Regulator) - DWA (Dynamic Window Approach)