Bug report
Description
2023-06-29, I add a 2D Lidar to my robot in Gazebo using the gazebo plugins, I follow the tutorial on gazebo webiste. It says the sensor will publish the data on the topic which is set in the .gazebo file.
For example, the description down below will make the sensor to publish the data on
/rrbot/laser/scantopic.
<plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_gpu_laser.so">
<topicName>/car/laser/scan</topicName>
<frameName>hokuyo_link</frameName>
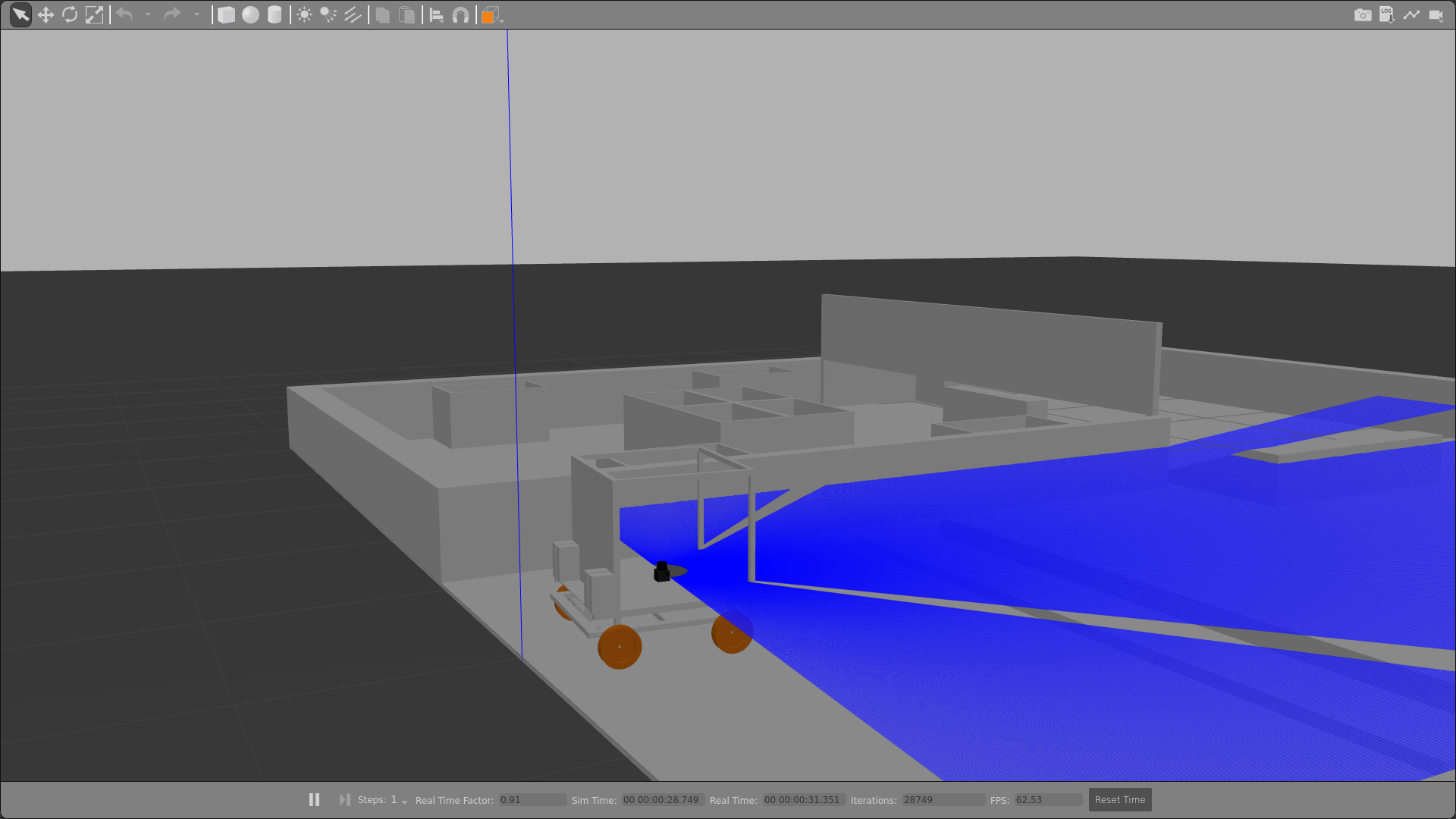
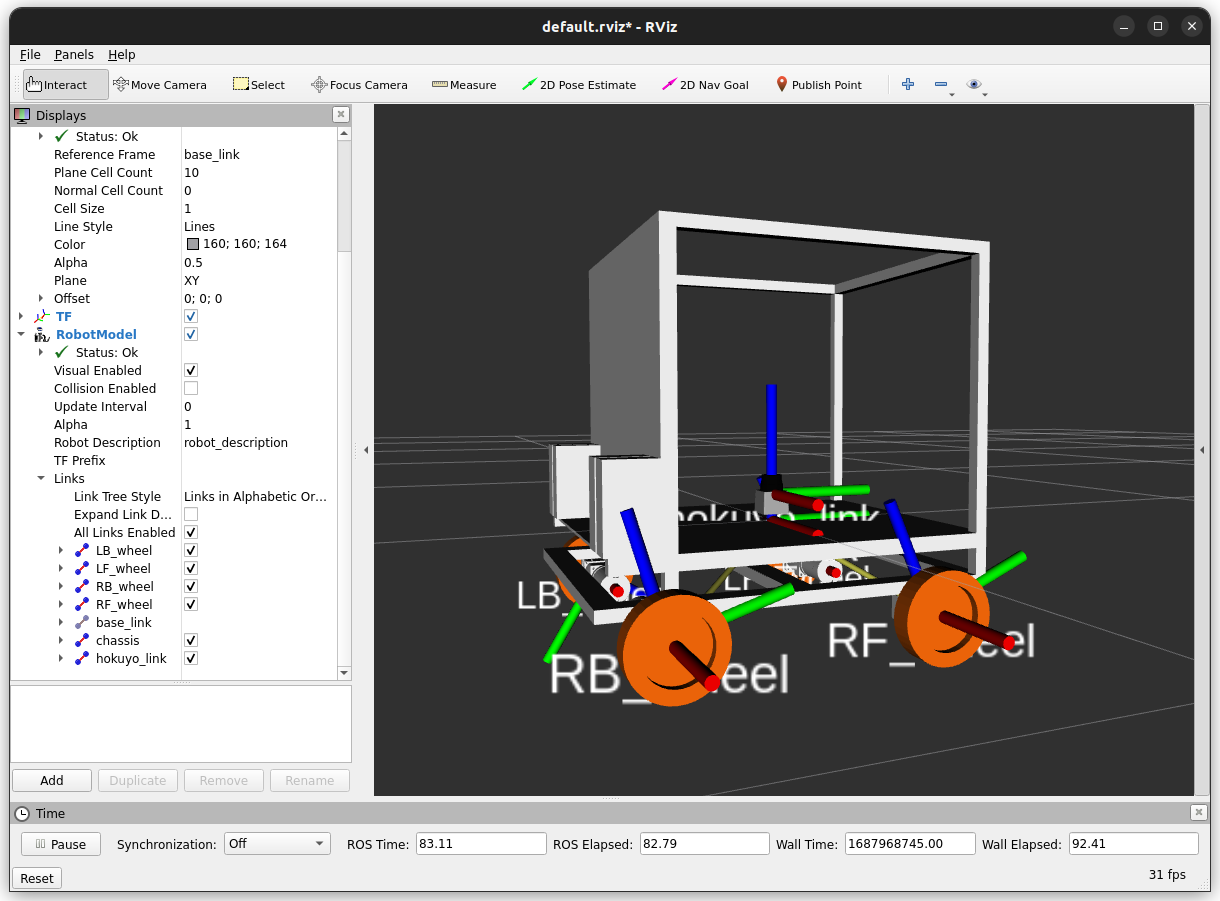
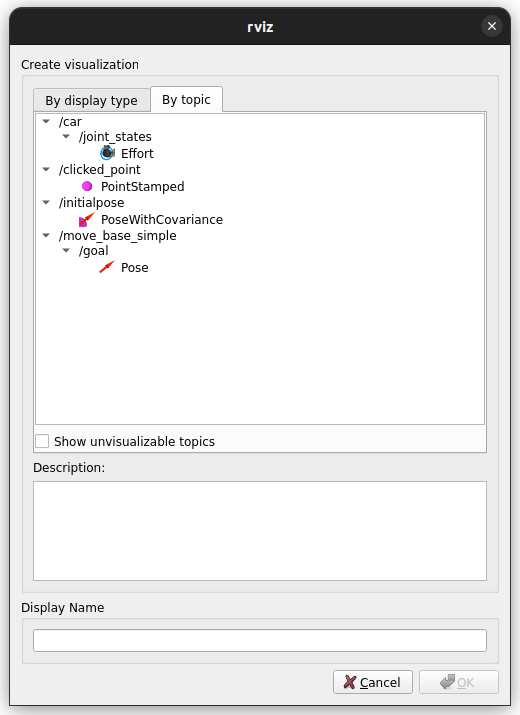
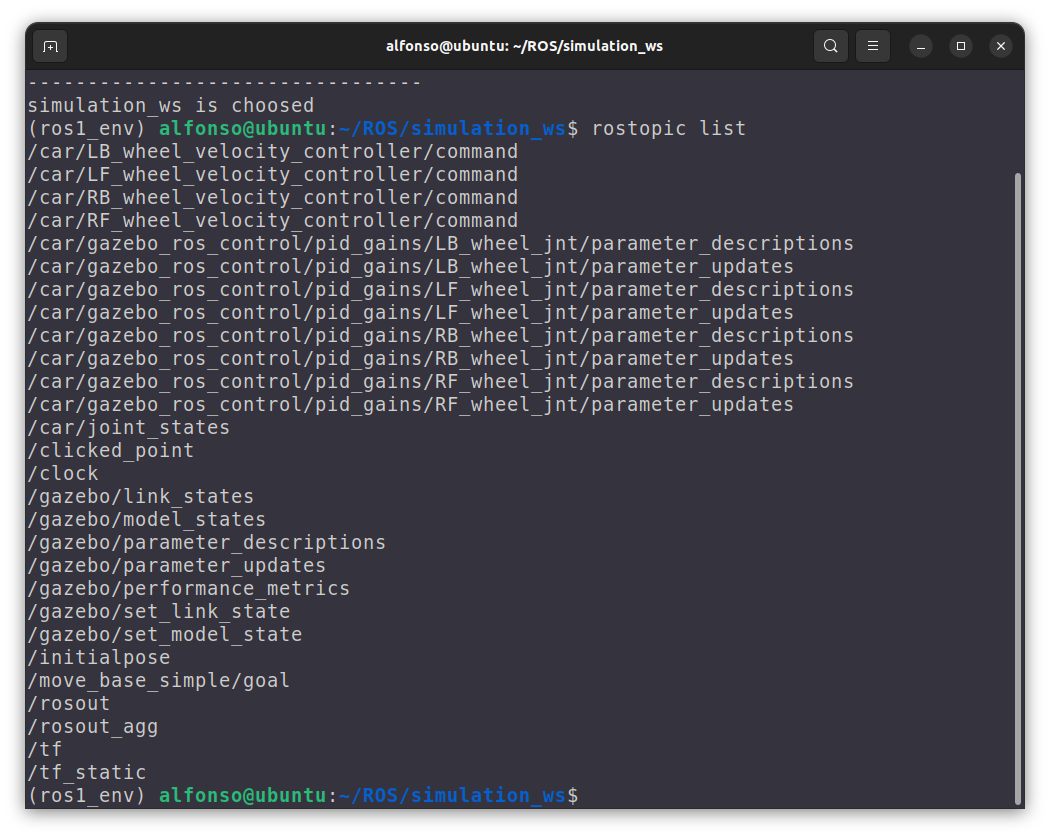
</plugin>The lidar is successfully built and activated in the gazebo world. However, there is no correspond topic when I use rostopic list, and also I cannot view the data by selecting the topic in Rviz.
Screen Shots
Similar issue
- Discourse - LaserScanner in Gazebo does not publish data while topic is set
- Discourse - Not able to Publish hokuyo data in ROS
What I’ve tried
- Switch to robostack ros2 humble
- Problem : Gazebo flashback always
- Switch to Desktop ros2 humble
- Problem : Cannot source the path properly
- I am able to run the example ros2 launch, but cannot run the package I build my self.
-
substitution args not supported: cannot import name 'Log' from 'rosgraph_msgs.msg' (/opt/ros/humble/local/lib/python3.10/dist-packages/rosgraph_msgs/msg/__init__.py)
- There’s a great Video - tutorial on yt, if we can use the gazebo in ROS2, the work will be more easier.